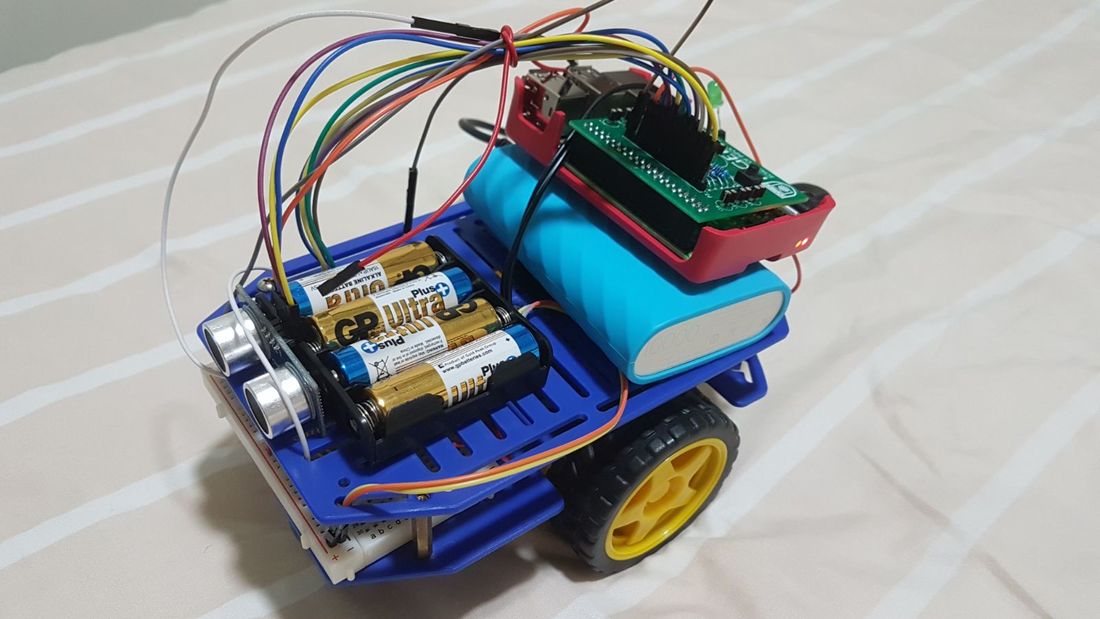
Final Post (For assignment)We finally concluded our assignment after last week's Demo Day. Despite all the difficulties we faced, my team managed to produce a working robot to present on Demo Day. To conclude, here are some images of the robot, along with a short video of the robot.
0 Comments
Video of Working robotDuring the Demo Day, due to some technical difficulties (the wires connecting the battery to the motors broke again), we could not present the fully working robot. Soon after, my group went to solder the robot to fix it. Fortunately, our robot started to work again. Here is the video of the robot:
Assignment Update #4My group has finished most of the implementations of functions to the robot. However, the code still has to be slightly updated so the programme can run without much conflict. Having the robot and Raspberry Pi, I will plan to complete the programme during the weekends before the demo-day next Thursday 1 February.
Assignment Update #3Thankfully, our lecturer, Mr Teo, managed to help us repair our robot, so we could continue programming our robot.
While trying to use the sample code to make the robot move using wiringPi, my group encountered many problems, including the use of wrong versions of wiringPi and Python not recognising modules of wiringPi. To overcome this issue, we decided to use RPi.GPIO to programme the bot to make it move as it is already in the Raspberry Pi. Thankfully, the programme finally worked and we could make some more progress. Assignment Update #2In the second week of school, my group received the robot and we continued to work on the programming aspect of the robot. However, we encountered several major issues:
- The first issue we encountered was the progamme which had an error (a sample programme was given to us). The programme included importing wiringPi for the programme to work. However, when trying to run the actual movement programme (after running the other 'setup' programmes), the programme included multiple errors, including an error where a function of wiringPi did not exist. - The second issue encountered involves the robot. Unfortunately, the wires connecting the breadboard to the batteries included disconnected and broke. Upon further inspection, my group noticed that the soldering of the wires to the battery was "not very good". Having a soldering set at home, I hope that I can repair the robot. If I am unable to solve this issue, the robot will not work and I will not be able to complete and present properly. Thus, I hope that help is provided to overcome this issue. Assignment Update #1Greetings. Welcome to the first update of the assignment for my participation in my group. The 2-week study break had just concluded, and so did the year 2017. I will now summarise what I did in the past 2 weeks:
- Since my group has not received the parts required for the construction of the bot (i.e. motor and wheels, GPS), we could not develop the actual prototype of the bot. - Since we could not do much in terms of hardware, we decided to plan more and do some of the programming of the bot. Over the 2-week break, I researched on sample Python progammes which can be used to manipulate the motors which will be attached to the Raspberry Pi. Even though I could not test the actual programmes themselves, I saved the programmes which can potentially be used, and will test them once the motors arrive. However, we do have LEDs, and I modified the programme for the LEDs (which I learned) to be able to be used in this situation. - Once P1 lessons resume on 3 January, my group plans to continue to work on the bot, and hopefully we will receive the requested motors. Assignment Proposal(Original on 29 November 2017)
For my assignment, my group has planned to develop a machine which aids in traffic control. For example, when an accident occurs, it will take some time for the police and civil defense to reach the location, especially during peak hours or bad weather conditions. This machine will be able to perform multiple tasks, like send a robot to the affected location to guide traffic, and observe the speeds of all vehicles in a certain area to see if any vehicles are exceeding the speed limit. Team Members: Austin, Boon Kai, Zachary (Edit on 1 January 2018) The main programming language used is Python, and Raspberry Pi will be used as the main core for the robot. Welcome to my development blog!Hello there, and welcome to my development blog! Over here, I will be using this blog for Portfolio 1, and will add weekly updates on my assignment and CA2.
|
AuthorYear 1 student from Ngee Ann Polytechnic taking a Diploma in Information Technology. Archives
February 2018
Categories |
||||

 RSS Feed
RSS Feed
